制造技术基础训练D——机器人创意实践
记一次全天的“金工实习”
制造技术基础训练D——机器人创意实践
机器人创意实践
早八工训楼谁受得了,偏偏让我们碰上了,一上就上一天,8:00-16:55一秒不耽误。
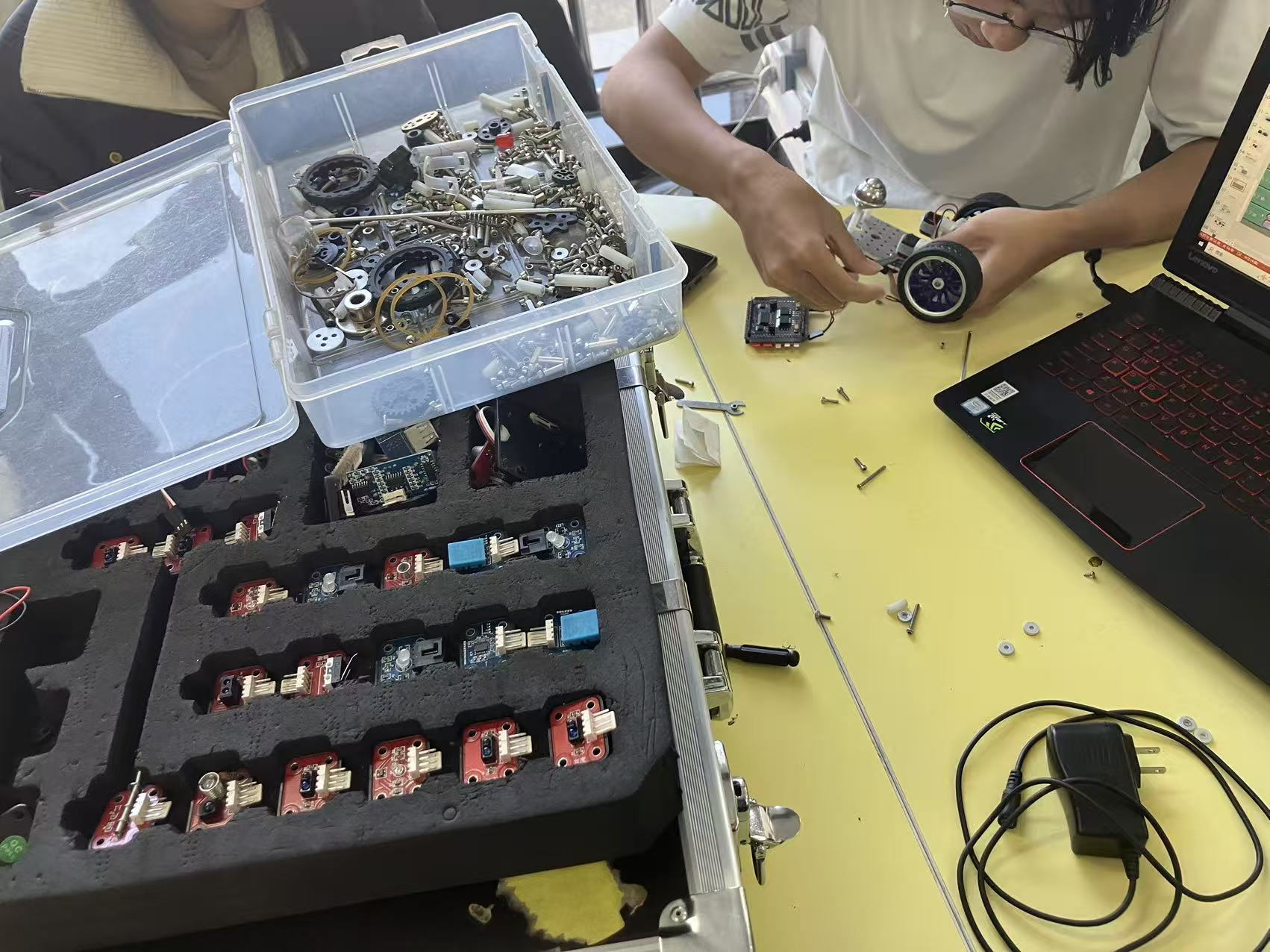
整个实习过程都是围绕展开,机械部分没看出来用得什么器材,硬件使用Basra Arduino开发板与BigFish扩展版。
一开始就是按照电脑上的PPT开始超级拼装,有很多细节需要注意,尤其是安装电机的时候。老师查验完之后会下发开发板和蓝牙模块。最终任务就是进行机器人抢球大赛,允许使用舵机构建一个铲子把场地中的球、方块放到指定的有围挡的区域。
四人为一小组来展开实验,老师很逆天地按学号分组,但也很幸运地遇到了全场最佳机械师和全场最佳操作员,最后我们以4分夺得冠军,算是完美收官。
成果展示
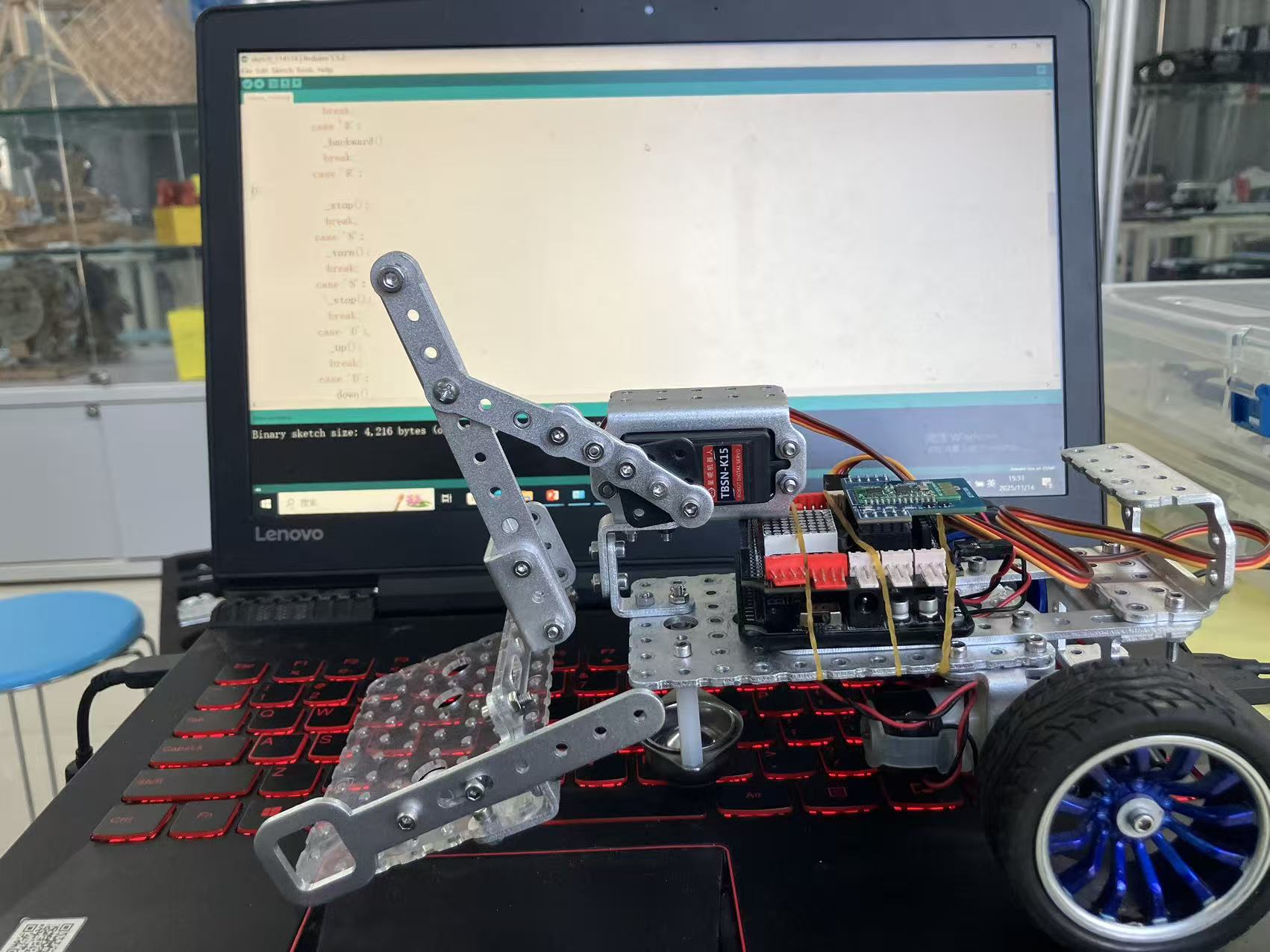
代码展示
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
#include <Servo.h>
int ANGEL = 1;
Servo servo_pin;
void setup(){
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
servo_pin.attach(3);
Serial.begin(9600);
}
void loop(){
bluetooth();
}
void bluetooth(){
if(Serial.available() > 0){
char cmd = Serial.read();
switch(cmd){
case 'F':
_forward();
break;
case 'B':
_backward();
break;
case 'L':
_turn_left();
delay(150);
_stop();
break;
case 'R':
_turn_right();
delay(150);
_stop();
break;
case 'S':
_stop();
break;
case 'N':
_turn();
break;
case 'S':
_stop();
break;
case 'U':
_up();
break;
case 'D':
_down();
break;
}
}
}
void _up(){
if(ANGEL < 210)ANGEL+=10;
servo_pin.write( ANGEL );//舵机角度
}
void _down(){
if(ANGEL > 10)ANGEL-=10;
servo_pin.write( ANGEL );
}
void _forward(){
digitalWrite( 5 , HIGH );
digitalWrite( 6 , LOW );
digitalWrite( 9 , HIGH );
digitalWrite( 10 , LOW );
}
void _stop(){
digitalWrite( 5 , LOW );
digitalWrite( 6 , LOW );
digitalWrite( 9 , LOW );
digitalWrite( 10 , LOW );
}
void _backward(){
digitalWrite( 5 , LOW );
digitalWrite( 6 , HIGH );
digitalWrite( 9 , LOW );
digitalWrite( 10 , HIGH);
}
void _turn_right(){
digitalWrite( 5 , LOW );
digitalWrite( 6 , LOW );
digitalWrite( 9 , HIGH );
digitalWrite( 10 , LOW );
}
void _turn_left(){
digitalWrite( 5 , HIGH );
digitalWrite( 6 , LOW );
digitalWrite( 9 , LOW );
digitalWrite( 10 , LOW);
}
void _turn(){
digitalWrite( 5 , HIGH );
digitalWrite( 6 , LOW );
digitalWrite( 9 , LOW );
digitalWrite( 10 , HIGH);
}
相关资料下载
课件:已上传至BIT101 Onedrive,位于【制造技术基础训练D】,课程编号:100031315, ⬇️ 下载文件
操控软件:Arduino Bluetooth Controller,使用这个软件是因为老师给的软件实在太老,在部分手机上即使正常安装也无法正常运行,所以选用一个新软件,亲测可用,⬇️ 下载文件。需要注意的是,这个下载地址是uptodown.com,我在官网并没有找到下载地址。
This post is licensed under CC BY 4.0 by the author.